Sync or Async
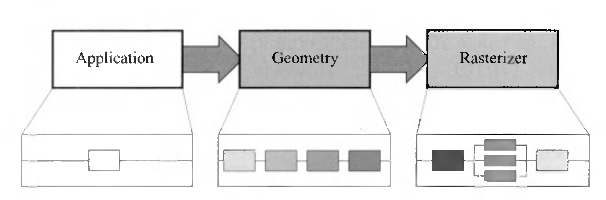
GPU虽然是以并行计算出名,但其更基础的架构仍然是一套pipeline。与CPU类似,GPU也拥有很长的pipeline, 但基本上可以划分为 两个大的阶段:几何(Geometry)和光栅化(Rasterization)。使用Pipeline的优点是,可以将一个大的工作,分成好几个阶段 每个阶段可以同时执行。理论上N级的流水线能将效率最大提升N倍。例如,当一部分图元在进行光栅化操作时,一些新的图元已经开始进入 几何阶段进行处理。从而保证pipeline的各个阶段都处于忙碌之中。套用这个观点,其实可以把GPU命令的准备阶段(运行在CPU上, 包括app和gfx driver)也看成整个3D Pipeline的一部分。所谓图形驱动的异步性,就是使CPU和GPU同时忙碌起来,GPU在处理 上一批命令,而CPU正在准备下一批命令,从而提高系统并行度。
Fence
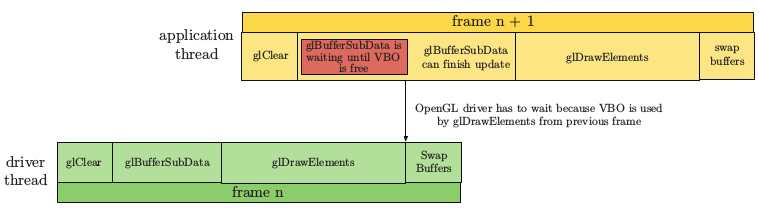
异步性虽然增加了系统整体的并行度,但也使图形驱动的实现变得更见困难和复杂,因为我们需要一种机制,能够保证资源访问的互斥, 并能查询某些资源在GPU端的使用状态。比如一张texture如果刚刚用于draw,紧接着对其调用glTexImage2D,驱动必须保证, 对这张texture的修改是在上一次的draw完成以后。在硬件层面,GPU可以在命令流中插入一些所谓的Fence命令,保证只有在Fence的条件 满足之后,才能执行接下来的命令。而在该段命令流完成之后,GPU则会更新一些状态(往往是内存中的一些计数单元),这些命令可以称为Update命令。 有了这种硬件支持,client端的驱动就有能力协调好各种buffer的访问同步了。一段命令流大致的执行阶段如下:
一般来说,驱动会负责维护好资源之间的同步,用户不必担心。但OpenGL和EGL也提供了一种叫sync objects的对象,可以用上述的Fence/Update 将GPU上命令的执行状态暴露给用户,以用来做更灵活的处理(比如用户想显示等待渲染完成)。一个sync刚创建时处于unsignaled状态。 当插入到命令流中被GPU执行过以后,就变成了signaled状态。
Android Native Fence
以上是描述一个render context的情形。当某些Buffer需要在多个context之间传输时,这种异步性又如何体现呢?在现如今的Android 或者Linux桌面平台上,都有所谓的系统合成者(SurfaceFlinger/DRI2)的存在。即APP渲染一块buffer之后,把这块buffer传给 合成者,由合成者负责合成所有的图层,并把结果显示到屏幕上。一种简单的实现方法是,APP等待自己的渲染命令完成,确保buffer已经 被填入正确的内容,然后再传给合成者。但这显然不是一种高效率的实现。假设APP下命令的时间为t1,而GPU渲染的时间为t2,则合成者 至少要等到t1 + t2之后,才能开始下相关的合成命令,假设所需的时间是t3,则GPU至少要等到t1 + t2 + t3之后,才能真正处理合成 命令。而我们希望合成者在t1 ~ t2之间就能发出合成命令,GPU在APP端的渲染完成之后(t1 + t2),就能立刻处理合成命令。同理, APP的渲染一般要等到合成者用完buffer,重新传回给APP端之后才能进行。但最完美的结果是,APP端可以提前可以下命令,在GPU处理完 合成命令后,就立刻处理下一帧的渲染命令。在这种生产者和消费者的环形工作模型下,CPU一直领先GPU几拍,两者始终忙碌于各自的工作。 对于系统渲染负载较高的情况,这种模型尤为有利!
安卓为了实现这套模型,引入了Android native fence对象。考虑到APP和Composer处于不同进程,所以这个对象的首要能力就是能 跨进程传输,所以native fence是用一个fd来表示的,可以用Binder进行传输,就跟native buffer一样。安卓又引入了一个叫 Fence的类,这个类是用来作引用计数的,唯一的成员变量就是一个fd。这个fd在kernel层对应一个叫struct fence的结构体。 另外还有两个重要的结构体叫做sync_timeline和sync_pt。 三者的介绍如下。
sync_timeline: A sync_timeline is a monotonically increasing timeline that should be implemented for each driver instance, such as a GL context, display controller, or 2D blitter. This is essentially a counter of jobs submitted to the kernel for a particular piece of hardware. It provides guarantees about the order of operations and allows hardware-specific implementations.
sync_pt: A sync_pt is a single value or point on a sync_timeline. A point has three states: active, signaled, and error. Points start in the active state and transition to the signaled or error states. For instance, when a buffer is no longer needed by an image consumer, this sync_point is signaled so that image producers know it is okay to write into the buffer again.
sync_fence: A sync_fence is a collection of sync_pts that often have different sync_timeline parents (such as for the display controller and GPU). These are the main primitives over which drivers and userspace communicate their dependencies. A fence is a promise from the kernel that it gives upon accepting work that has been queued and assures completion in a finite amount of time.